
| Funding Agency | European Union 7th Framework Programme |
| Program | International Reintegration Grants |
| ID/Acronym | 239320 / HIPHAD |
| Grant Period | April 2009—April 2013 |
| Principal Investigator | Dr. Mehmet İsmet Can Dede |
| Project Group | Tunç Bilgincan, Emre Uzunoğlu, Omar W. Maaroof, Osman Nuri Şahin |
| Status | Completed |


The first objective of the project HIPHAD is designing a haptic system with higher precision ratings to be used in state-of-the-art applications such as robotic surgeries. It is aimed to explore new and alternative mechanical designs to improve the precision of the haptic device. The design will be based on parallel mechanisms as nowadays they are widely used by the researchers and as the CNC industry is using these mechanisms in CNC machining to reach high precision goals. Alternative configurations of these parallel mechanisms will be possible to be built in order to meet the requirements of the selected mission. The outcome of the research on alternative mechanism designs for the selected specific tasks will be a valuable contribution to the robotics technology. A secondary objective of the project is to explore effectiveness of haptic system structures for certain tasks. The haptic system structures that will be studied in the project are closed-loop admittance, open-loop impedance and closed-loop impedance structures.
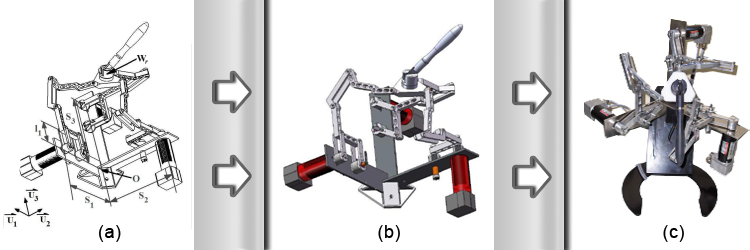
Studies are conducted to develop a new mechanical structure that has the potential to increase the precision in the desktop haptic devices complying with all the objectives of this project. First, previously developed haptic devices and manipulator structures are reviewed. Following this, the conceptual designs are formed and a hybrid structured haptic device is designed, manufactured and tested. Developed haptic device’s control algorithm and Virtual Reality (VR) application is developed. Integration of the mechanism with mechanical, electromechanical and electronic components and the initial tests of the system are executed and the results are presented. The device is an experimental set-up which has the flexibility to be configured as either closed-loop admittance, open-loop impedance or closed-loop impedance structured device. A force sensor is integrated, by using the interface already built, to re-configure the system as a closed-loop haptic device. Figure 1 shows the simulation model
and actual pictures of the developed experimental desktop haptic device, HIPHAD v1.0.
Parallel mechanisms in general have a smaller workspace with respect to the serial mechanisms. The use of only revolute joints in parallel mechanisms increases the workspace with respect to the footprint of the device. Thus, R-Cube and Delta type mechanisms provide satisfactory results for workspace constraints. The first mechanism examined, which is a modified R-Cube mechanism, is for open-loop impedance structured configuration with direct drive actuators for higher bandwidth specifications. The main problem is on gravity compensation to achieve better Z-width measure. Studies for balancing are conducted to constrain the usage of actuation system for only displaying forces/torques and not helping in gravity compensation. The equal length legged four-bar design on the actuation link enables the usage of various actuators and position/velocity sensors to be used. Thus, various transmission types and actuation systems are examined in this test set-up.
Another problem arises when the workspace requirement is much larger than the workspace that a desktop device can offer. Back-driveability is a main problem when the workspace becomes larger and thus, in these types of applications, higher reduction ratios are commonly used. Higher reduction ratios in actuation limit the back-driveability which calls for a closed-loop control strategy by integrating a force/torque sensor. In this project, this issue is also addressed by designing and constructing a closed-loop admittance type haptic device that has enough workspace to capture the data from the whole workspace of a human arm while the human is in sitting position. CAD model, structural analysis result representation and the constructed view of the closed-loop admittance type of haptic device developed in this reporting period is shown in Figure 2.

Overall, in this project, cutting edge technologies will be investigated to configure a haptic device design to be used in state-of-the-art applications such as robotic surgeries or unmanned operations. HIPHAD shows great potential to initiate future developments of other state-of-the-art devices to be employed for unmanned missions that have high precision needs. The relevant system structures are addressed for various rehabilitation robots that will have active, passive and assist on demand modes as another outcome of this research project. Status of the project is continuously announced through the project website (http://www.iyte.edu.tr/~candede/hiphad.html).
[1] M. İ. C. Dede, Duygu Çömen, Gökhan Berker, and İlkay Erkılınçoğlu “Kinematic Synthesis of Motion Generation of Linkages,” IFToMM International Journal of Problems of Mechanics, Volume 48, Number 3, pp. 13-20, 2012.
[2] M. İ. C. Dede, Duygu Çömen, İlkay Erkılınçoğlu, and Emre Uzunoğlu “Kinematic Synthesis of Path Generation of Planar Mechanisms,” IFToMM International Journal of Problems of Mechanics, Volume 48, Number 3, pp. 38-42, 2012.
[3] D. Çömen, İ. Erkılınçoğlu, and M. İ. C. Dede, “Kinematic Synthesis of Function Generating Spatial RTSR Mechanism by Chebyshev Approximation,” IFToMM International Journal of Problems of Mechanics, Volume 46, Number 1, pp. 15-20, 2012.
[4] T. Bilgincan, Ö. Selvi, Y. Kant, and M. İ. C. Dede, “Novel Structural Design of a Robotic Device for use in Virtual Reality Simulators,” Proceeding of the National Machine Theory Symposium UMTS 2009, Guzelyurt, Turkish Republic of Northern Cyprus, July 2-4, 2009.
[5] M. İ. C. Dede, Ö. Selvi, T. Bilgincan, and Y. Kant, “Design of a Haptic Device for Precision Operations,” Proceeding of the IEEE International Conference on Systems, Man & Cybernetics, SMC 2009, San Antonio, Texas, pp. 3623 – 3628, October 10-12 2009.
[6] T. Bilgincan, and M. İ. C. Dede,“Development of an R-CUBE Based General Purpose Haptic Device System,” Proceedings of the ASME 2010 10th Biennial Conference on Engineering Systems Design and Analysis, Istanbul, Turkey, July 12-14, 2010.
[7] T. Bilgincan, E. Gezgin, and M. İ. C. Dede,“Integration of the Hybrid-Structure Haptic Interface HIPHAD v1.0,”Proceedings of the International Symposium of Mechanism and Machine Theory, Izmir, Turkey, pp. 267 – 284, October 5-8, 2010.
[8] Ş. İmren, M. İ. C. Dede, and S. Özdemir, “A Reinforced Learning Algorithm for Minimizing the Position Errors due to the Wear of Joint in Four-Bar Mechanism,” National Meeting of Turkish National Automatic Control Committee (TOK 2011), September 14-16, 2011.
[9] O. N. Şahin, T. Erinç;, and M. İ. C. Dede,”Unlimited-Workspace Teleoperation with Obstacle Avoidance Capability,” National Meeting of Turkish National Automatic Control Committee (TOK 2012), September 11-12, 2012.
[10] O. Maaroof, E. Gezgin, and M. İ. C. Dede, “General Subtask Controller for Redundant Robot Manipulators,” 12th IEEE Int. Conf. on Control, Automation and Systems (ICCAS 2012), Jeju Island, Korea, October 17-21, 2012.
[1] T. Bilgincan “Design of a six Degree-of-Freedom Haptic Hybrid Platform Manipulator,” MSc Thesis, Izmir Institute of Technology, 2010.
[2] O. N. Şahin, “Unlimited-Workspace Teleoperation,” MSc Thesis, Izmir Institute of Technology, 2012.
[3] E. Uzunoğlu, “Position/Force Control of Systems Subjected to Communication Delays and Interruptions in Bilateral Teleoperation,” MSc Thesis, Izmir Institute of Technology, 2012.