
| Thesis Student | Osman Nuri Şahin |
| Program | MSc Thesis Project |
| Status | Completed |
Teleoperation is operating vehicles or manipulators from a distance. A teleoperation system includes two subsystems and a communication line. One of these subsystems, called master, is used by an operator and it acquires the operator’s demand. This demand can be in terms of motion and/or force. The other subsystem, called slave, is driven by operator’s demands. Communication line provides data transfer between the master and the slave subsystems. Teleoperation systems are divided into two main categories as unilateral and bilateral teleoperation.
Teleoperation is, in its brief description, operating a vehicle or a manipulator from a distance. Teleoperation is used to reduce mission cost, protect humans from accidents that can be occurred during the mission, and perform complex missions for tasks that take place in areas which are difficult to reach or dangerous for humans. Teleoperation is divided into two main categories as unilateral and bilateral teleoperation according to information flow. This flow can be configured to be in either one direction (only from master to slave) or two directions (from master to slave and from slave to master). In unlimited-workspace teleoperation, one of the types of bilateral teleoperation, mobile robots are controlled by the operator and environmental information is transferred from the mobile robot to the operator. Teleoperated vehicles can be used in a variety of missions in air, on ground and in water. Therefore, different constructional types of robots can be designed for the different types of missions
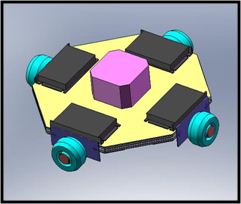
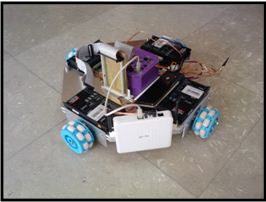
This work aims to design and develop an unlimited-workspace teleoperation which includes an omnidirectional mobile robot as the slave system to be used in further researches. Initially, an omnidirectional mobile robot was manufactured and robot-operator interaction and efficient data transfer was provided with the established communication line. Wheel velocities were measured in real-time by Hall-effect sensors mounted on robot chassis to be integrated in controllers. A dynamic obstacle detection system, which is suitable for omnidi rectional mobility, was developed and two obstacle avoidance algorithms (semi-autonomous and force reflecting) were created and tested. Distance information between the robot and the obstacles was collected by an array of sensors mounted on the robot. In the semi-autonomous teleoperation scenario, distance information is used to avoid obstacles autonomously and in the force-reflecting teleoperation scenario obstacles are informed to the user by sending back the artificially created forces acting on the slave robot. The test results indicate that obstacle avoidance performance of the developed vehicle with two algorithms is acceptable in all test scenarios. In addition, two control models were developed (kinematic and dynamic control) for the local controller of the slave robot. Also, kinematic controller was supported by a gyroscope feedback.