Thrust Control System Design for Unmanned Marine Vehicles
Funding Agency
Program
ID/Acronym
Grant Period
Principal Investigator
Dr. Mehmet İsmet Can Dede
Project Group
Buğra Alkan
Status
Inactive
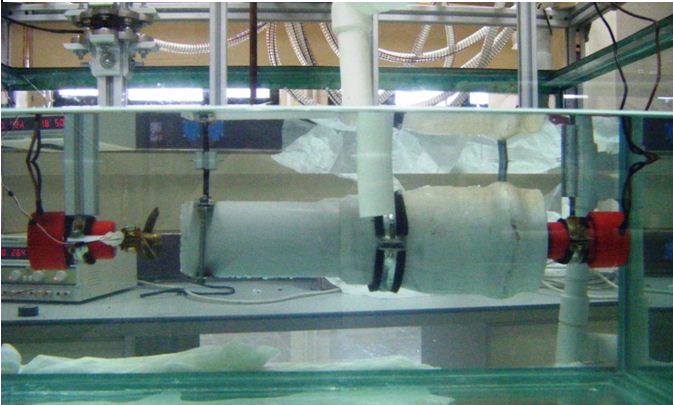
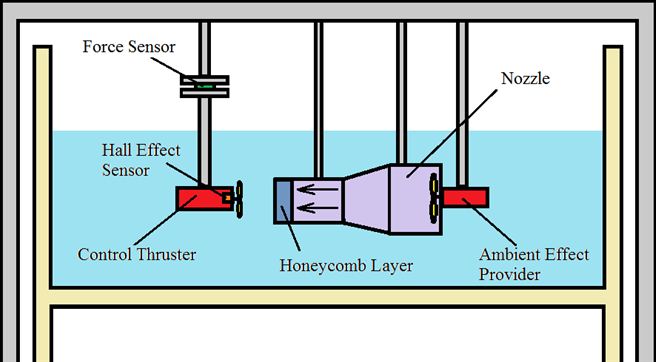
In conventional electric propulsion systems with fixed pitch propellers, controllers are usually aimed at controlling the shaft speed only, without fully utilizing the capabilities of the electrical motors to apply other control strategies. In the dynamic operating conditions, ambient flow velocity (which is created by ocean currents and vehicle’s own speed) effects whole thruster performance dramatically; this leads to undesired oscillations in thrust, torque, and power. Therefore, in this project we aimed to design a novel feedback-based thrust controller which can deal with these types of thrust fluctuation problems. By using this controller, our open-water model test experiments show that significant reductions in thrust fluctuations and thrust tracking reliability at different flow scenarios can be achieved
Publication List
Conferences
[1]B. Alkan, Özkol, and M. İ. C. Dede, “Thrust Control for Unmanned Marine Vehicles with Velocity Feedback,” National Meeting of Turkish National Automatic Control Committee, September 14-16, 2011.