Position/Force Control of Systems Subjected to Communication Delays and Interruptions in Bilateral Teleoperation
Thesis Student
Emre Uzunoğlu
Program
MSc Thesis Project
Status
Completed
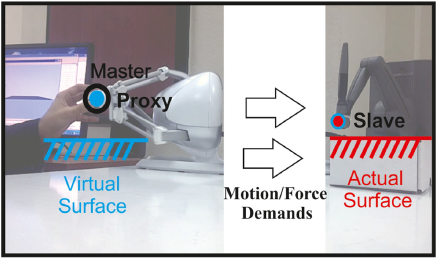
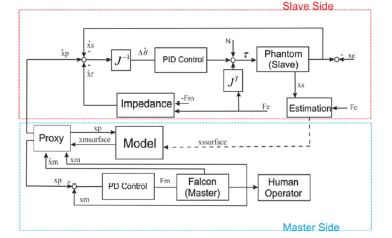
Teleoperation technology allows to remotely operate robotic (slave) systems located in hazardous, risky and distant environments. The human operator sends commands through the controller (master) system to execute the tasks from a distance. The operator is provided with necessary (visual, audio or haptic) feedback to accomplish the mission remotely. In bilateral teleoperation, continuous feedback from the remote environment is generated. Thus, the operator can handle the task as if the operator is in the remote environment relying on the relevant feedback. Since teleoperation deals with systems controlled from a distance, time delays and package losses in transmission of information are present. These communication failures affect the human perception and system stability, and thus, the ability of operator to handle the task successfully. The objective of this thesis is to investigate and develop a control algorithm, which utilizes model mediated teleoperation integrating parallel position/force controllers, to compensate for the instability issues and excessive forcing applied to the environment arising from communication failures. Model mediation technique is extended for three-degrees-of-freedom teleoperation and a parallel position/force controller, impedance controller, is integrated in the control algorithm. The proposed control method is experimentally tested by using Matlab Simulink blocksets for realtime experimentation in which haptic desktop devices, Novint Falcon and Phantom Desktop are configured as master and slave subsystems of the bilateral teleoperation. The results of these tests indicate that the stability and passivity of proposed bilateral teleoperation systems are preserved during constant and variable time delays and data losses while the position and force tracking test results provide acceptable performance with bounded errors.