
| Funding Agency | THE SCIENTIFIC AND TECHNOLOGICAL RESEARCH COUNCIL OF TURKEY (TÜBİTAK) |
| Program | 1003 |
| ID/Acronym | 115E726 / Neuroboscope |
| Grant Period | 2016-2018 |
| Principal Investigator | Dr. M. İ. Can Dede |
| Project Partners |
|
| Project Group |
|

Aim:
Pituitary is special liquor organ placed in between the visual nerves in the skull base. The NeuRoboScope project aims to develop a special robotic system which will be used to support the endoscopic pituitary surgery procedures that are performed to clear pathologies caused by the pituitary. The proposed system aims to enable the surgeon to operate three different operation tools (one of them is the endoscope) simultaneously. By this way, it is expected that the productivity of the surgical operation will be improved and the duration of the operation will be shortened. In proposed system, a main control unit that can be attached to any of the surgical tools that are used in the operation (other than the endoscope) will be developed to capture the motion of the surgeon’s hand motion, to process the captured motion and to send it to the robot that handles the endoscope. In this way, the endoscope will be directed simultaneously by the surgeon throughout the operation while he/she is using the other surgical tools with his/her two hands.
Short Summary of the Topic:
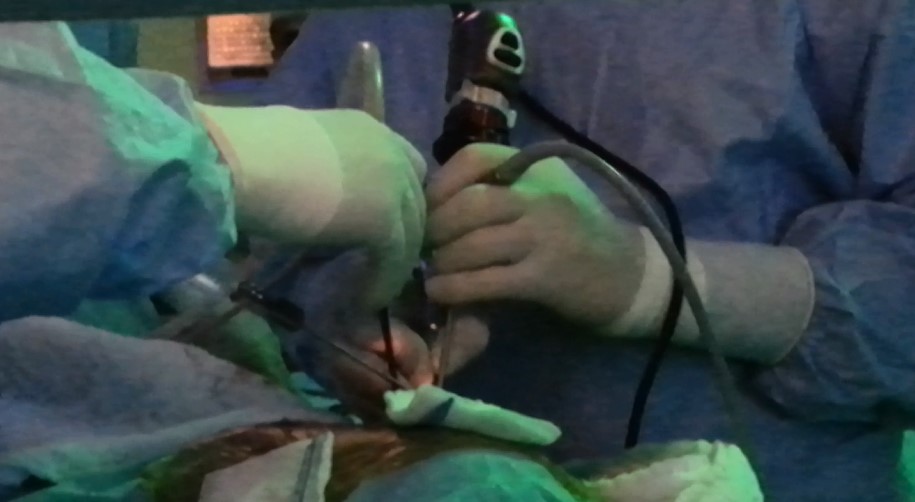
The pituitary is an important liquor gland that controls much hormonal liquor and by this way directly or indirectly it affects the working mechanism of all organs in the body. Because of these vital procedures that it is responsible, for the pathologies constructed around the pituitary causes serious health problems. The cure for this type of tumors is performed either by opening the scull or without opening skull but through the nostril operating by microscope or endoscopic transnazal transsfenoidal. Hence, the pituitary surgery is an efficient and modern procedure to cure this type of tumors. The endoscopic transnazal transsfenoidal procedure is performed by a tool named as endoscope which reflects a strong light through a light source to the operational area and provides the two dimensional (2D) video display of the operational field through its special optic systems. According to the others, this procedure is newer and more efficient one. Since it provides the visuals of the operational field from a closest distance from a wider visual angle, it affects the results of the surgery positively. Since it is performed through nostril in state of opening the skull, it is more convenient for the patients as well. On the other hand, one of the important problems that the surgeon face with in these operations is that the surgeon has to operate the endoscope, which provides the visuals about the operating area, by using his/her one hand. Since endoscope is heavier with respect to the other operating tools it causes the surgeon to get tried during an operation which usually takes 2-3 hours and the surgeon has to perform the operation by using his/her one hand since the other one is reserved for directing the endoscope throughout the operation. This causes longer operation durations and degrades the success of the operations. During the operation, the surgeon needs to use several tools such as aspirator, curette, drill and lancet at the same time and when he need to use two of these surgical tools, he/she requires the help of his/her assistant. However in this case, the assistant usually has problems to operate the endoscope according to the directions of the surgeon. Additionally, because of several reasons such as opposite position of the assistant according to the patient/operation desk compared to the surgeon and the tight surgical area, attention and coordination problems for the surgeons arise, which in return degrades the surgical performance. In order to address these problems, a system to hold the endoscope and even to guide it appropriately is essential. To help the surgeon for this problem although several endoscope holders have been developed, they are not very efficient for the clinical requirements and are not being in widespread use. This project aims to develop a novel robotic system to satisfy these requirements.
Organizational Approach and the main structure of the Method:
First the anatomical, radiological and surgical information about the endoscopic pituitary surgery and the system requirements will be determined by the expert surgeons specialized in this area. Since the proposed system is a robotics application, it requires an interdisciplinary approach. These disciplines are mechanical, electrical and electronics and software fields. Especially in this project, work will be carried out in mechanism science area to design a surgery robot mechanism with high precision and back-driveability that is balanced for gravitational effects for total system safety. The mode of operation is a teleoperation mode in which the inputs received from the surgical tool that the surgeon is used to direct the robot handling the endoscope. In this sense, work will be carried out in the discipline of system dynamics and control to develop the teleoperation system. Embedded coding studies will be conducted to run the developed control algorithms on the controller cards. In this context, data acquisition and signal processing studies will be conducted to regulate the real-time data transfer between the subsystems (sensors, actuators, controller cars, etc.). Surgical team will contribute to developing the 3D anatomical models, simulation environment and end-user evaluation for the designs on the anatomical model and cadavers. Preclinical tests (precision measurements, end-user evaluations on the simulator anatomical model and cadaver) are within the scope of this project however, since the operation is a risky and highly critical one, based on the results of the preclinical evaluations of the system, the clinical tests will be carried out after the project life-time.
On How to contribute to the goals and targets of the call program with the expected targets and outcomes of the project::
In this project, it is aimed to navigate the optical-camera system used in the endoscopic pituitary surgery by tracking the surgery tool that the surgeon uses. The experience gained while working on the mechanical, electronics and software aspects of this project will be used in other surgical robotics projects in the future. Project’s outcome is a robotics system to be used in minimally invasive surgery, which is also one of the goals of the call program. Aside the subsystems developed in this project, the developed overall system architecture will enable other similar surgical procedures to become robot-assisted surgeries.
[1] M. İ. C. Dede, O. W. Maaroof, G. Ateş, M. Berker, İ. Işıkay and Ş. Hanalioğlu “Unilateral Teleoperation Design for a Robotic Endoscopic Pituitary Surgery System,” 5th International Workshop on Medical and Service Robots, Graz, Austria, 4-6 July 2014.
[2] İ. Görgülü, O.W. Maaroof, B. Taner, M. İ. C. Dede, M. Ceccarelli “Experimental Verification of Quasi-Static Equilibrium Analysis of a Haptic Device,” Proceedings of the International Symposium of Mechanism and Machine Science, Baku, Azerbaijan, September 11-14, 2017.
[3] B. Taner, and M. İ. C. Dede “Image Processing Based Stiffness Mapping of a Haptic Device,” New Advances in Mechanisms: Mechanical Transmissions and Robotics, Part XIII, B. Corves, E-C. Lovasz, M. Hüsing, I. Maniu and C. Gruescu(Eds.), pp. 447-454, Springer, Dordrecht, The Netherlands, 2017. (DOI: 10.1007/978-3-319-45450-4_45).
[4] O. W. Maaroof and M. İ. C. Dede “Physical Human-Robot Interaction: Increasing Safety by Robot Arm’s Posture Optimization,” ROMANSY 21 – Robot Design, Dynamics and Control, Vincenzo Parenti-Castelli, Werner Schiehlen(Eds.), Volume 569, pp. 329-337, Springer, Dordrecht, The Netherlands, 2016. (DOI: 10.1007/978-3-319-33714-2_37).
[5] O. W. Maaroof, M. İ. C. Dede and G. Kiper “Alternating Error Effects on Decomposition Method in Function Generation Synthesis,” New Trends in Mechanism and Machine Science: Theory and Industrial Applications, Part VII, Philippe Wenger and Paulo Flores(Eds.), pp. 293-301, Springer, Dordrecht, The Netherlands, 2016. (DOI: 10.1007/978-3-319-44156-6_30).
[6] B. Uzun, T. Ayav, M.I.C. Dede, M. Berker, İ. Işıkay¸ Ş. Hanalioğlu, B. Özdemirel, G. Kiper, E. Tatlıcıoğlu, O.W. Maaroof, O. Işıtman, G. Ateş, A. Yaşır “Neuroboscope Sisteminin Model Tabanlı Sınaması / Model Based Verification of Neuroboscope System,” Otomatik Kontrol Ulusal Toplantısı, TOK’2016, pp. 347-352, 29 Eylül – 1 Ekim 2016, Eskişehir.