
| Funding Agency | Republic of Turkey, Ministry of Science, Industry and Technology |
| Program | SANTEZ |
| ID/Acronym | 01668.STZ.2012-2 |
| Grant Period | 2012-2014 |
| Principal Investigator | Assist. Prof. M İ Can Dede |
| Project Partners |
|
| Project Group |
|
| Status | Completed |
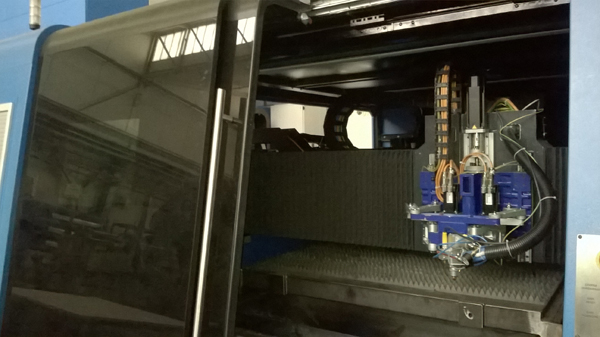
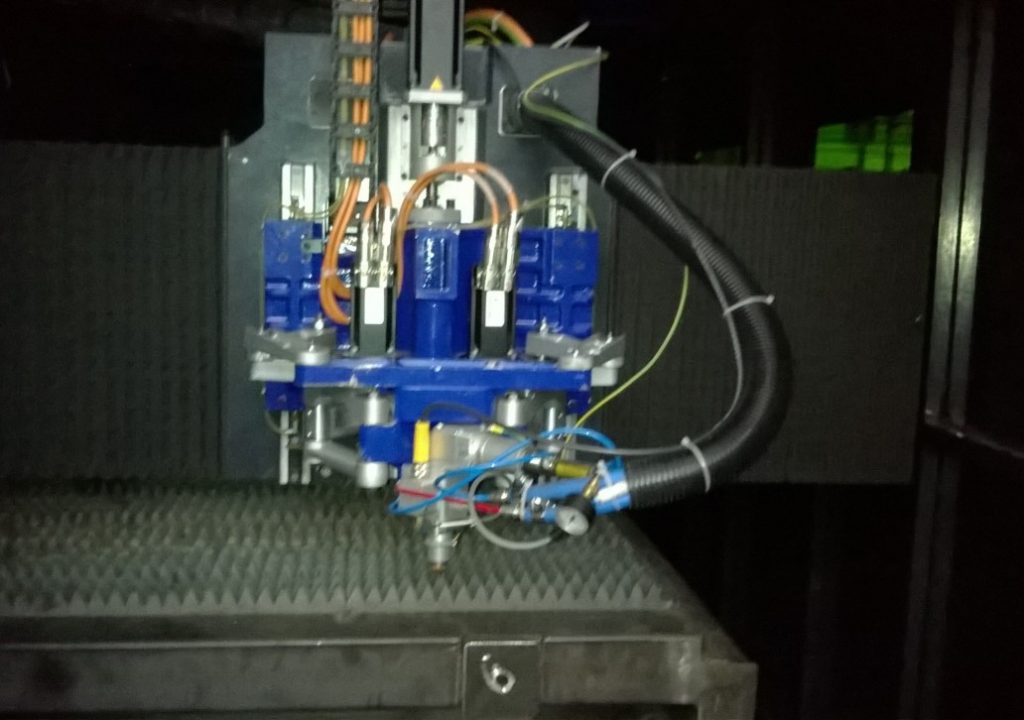
This project consists of the design, production and verification tests of a planar laser cutting machine. The reason that the conventional planar laser cutting machines cannot achieve higher acceleration, causing the loss of precision, is that for the motion on XY plane the inertial load is high when the action is realized along X and Y directions on the linear bearings. Although developing laser cutting tool technology brings the capability to carry out cutting operation in high speeds and less reaction times, the conventional cutting machines cannot make use of this potential and they can go up to 1.5-2g acceleration without the loss of precision. In the last 5-10 years, various international companies configured kinematically redundant mechanisms by adding extra actuation systems and were able to reach 5-6g acceleration levels. Integrated parallel mechanisms, with small workspace that can move along x and y direction (micro mechnaism), to the main construction that can move along the X and Y directions (macro mechanism) which can be named as a hybrid structure. As a result of this, in relatively small sized motions, they could reach higher accelerations because they are exposed to smaller inertial loads.
This study does not only contain the mechanism to be configured as a hybrid one but also requires the use of redundant robot controller. As a result of the conducted investigations, the scope of this project, an alternative design with respect to the existing redundant mechanisms can be made, which can reach high acceleration levels (>6g) while having at least the same precision that they have. In addition, in the scope of this project, kinematically redundant robot controller that optimizes the actuator motion for the highest acceleration that can be achieved by the mechanism was developed.
In the project, aside from the conventional machine design and production, both parallel mechanism design and redundant robot controller design issues were studied. The designs were produced, the developed controller algorithms were converted to embedded codes, and finally by the integration of mechanical structure, electromechanical components and the controller, the machine integration was completed.
The outcome of the project is the first redundant laser cutting machine in the Turkish Machine Industry, and third of its kind in the wrold that can reach higher accelerations using redundancy. The last tests provided that machine has accuracy of 0,042 mm/m and repeatability of ±0,008mm with maximum acceleration of 4g. The accuracy and repeatability of the machine are to be enhanced to a level that the machine can compete with conventional machines in the industry, with the completion of calibration process, and iterations in design and production. The comparison of machine working with only X-Y axes and working with proposed methods can be viewed in the videos uploded below.
Cutting with only X-Y axes
Cutting with proposed method
[1] M. İ. C. Dede, E. Gezgin, G. Kiper, E. Mastar, T. Sığırtmaç ve E. Uzunoglu “Kinematik Olarak Artıksıl Düzlemsel Lazer Kesme Makinaları Ãœzerine,” Ulusal Makina Teorisi Sempozyumu, Erzurum, pp. 76 – 85, Eylül 12-13, 2013.
[2] E. Uzunoğlu, M. İ. C. Dede, G. Kiper, E. Mastar, T. Sığırtmaç “Trajectory Planning of Redundant Planar Mechanisms for Reducing Task Completion Duration,” Advances on Theory and Practice of Robots and Manipulators Mechanisms and Machine Science, Marco Ceccarelli and Victor A. Glazunov (Eds.), Volume 22, pp 215-223 Springer, Dordrecht, The Netherlands, 2014 (ISBN: 978-3-319-07057-5).
[3] G. Kiper, T. Bilgincan, and M. İ. C. Dede “Funtion Generation Synthesis of Planar 5R Mechanism,” IFToMM International Journal of Problems of Mechanics, Volume 51, Number 2, pp. 28-31, 2013.
[4]R. I. Alizade, G. Kiper, M. Ä°. C. Dede and E. Uzunoglu “Derivation of Input/Output Relationship for the Bennett 6R Linkages Based on the Method of Decomposition,” New Advances in Mechanisms, Transmissions and Applications, Victor Petuya, Charles Pinto, and Erwin-Christian Lovasz (Eds.), pp. 225-232, Springer, Dordrecht, The Netherlands, 2013 (ISBN: 978-94-007-7484-1).
[5] G. Kiper, M. İ. C. Dede, E. Uzunoğlu, E. Mastar “Bakışımsız Bir Düzlemsel 5R Eyleyicisinin Bağlama Açısına Göre Tasarımı,” 17. Uluslararası Katılımlı Makine Teorisi Sempozyumu, İzmir, pp. 687-694, Haziran 14-17, 2015.
[6] E. Uzunoğlu, M. İ. C. Dede, G. Kiper “Trajectory Planning for a Redundant Planar Laser-Cutting Machine with Macro-Micro Manipulation,” The 14th IFToMM World Congress, Taipei, Taiwan, October 25-30, 2015 (DOI: 10.6567/IFToMM.14TH.WC.OS13.094).
[7] M. İ. C. Dede, G. Kiper and E. Uzunoğlu “A Macro-Micro Mechanism Design for Laser Cutting Process,” The 17th International Conference on Machine Design and Production, Bursa, Turkey, July 12-15, 2016.
[8] E. Uzunoğlu, M. İ. C. Dede, G. Kiper “Trajectory planning for a planar macro-micro manipulator of a laser-cutting machine,” Industrial Robot: An International Journal, Vol. 43 Iss: 5, pp.513 – 523. (DOI: 10.1108/IR-02-2016-0057).