Hovering-Mode Control of the Glider-Type Unmanned Underwater Vehicle
Thesis Student
Erman Barış Aytar
Program
MSc Thesis
Status
Completed
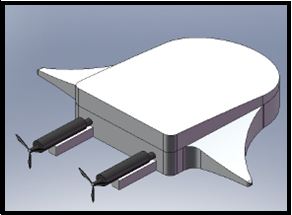
Research on the underwater robotics has attracted the interest of many researchers over the years. The primary reasons are the need to perform underwater intervention tasks that are dangerous for a diver and the need to perform underwater survey tasks that last for longer periods of time. Unmanned underwater vehicles can be divided into two categories. Most of the systems, today, that require a certain level of precision and dexterity are built as Remotely Operated Vehicles (ROV). On the other hand, the systems that perform repetitive tasks are configured as Autonomous Underwater Vehicles (AUV). The objective of the work is to design a novel, cost-efficient, and fault-tolerant ROV that can hover and be used for shallow water investigation. In order to reduce the cost, the numbers of thrusters are minimized and internal actuators are used for steering the vehicle and stability in hovering mode. Also, the design is planned to be open for modification for further improvements that will enable the use of the vehicle for intervention tasks and studies.