HISS: design of a Haptic system with Improved performance via developing its new Sub-Systems
Funding Agency
THE SCIENTIFIC AND TECHNOLOGICAL RESEARCH COUNCIL OF TURKEY (TÜBİTAK)
Program
1005
ID/Acronym
117M405 / HISS
Grant Period
2017-2019
Principal Investigator
Dr. M. İ. Can Dede
Project Group
Dr. M. İ. Can Dede
Dr. Gökhan Kiper
İbrahimcan Görgülü, PhD Student
Görkem Karabulut, PhD Student
Murat Demirel, PhD Student
Emir Mobedi, PhD Student
Çağhan Kirişçi, MSc Student
Veysel Sekendiz, MSc Student
Aim:
In this project, by carrying out work for a new mechanism, new sub-components and model improvements in desktop haptic device technology, a device, and its sub-components are aimed developed to be used in processes that require precision such as remote surgical systems
Short Summary of the Topic:
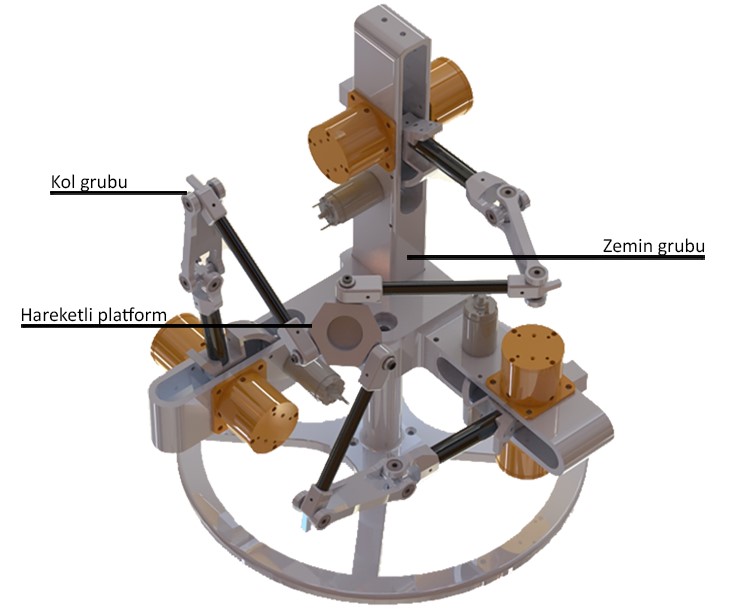
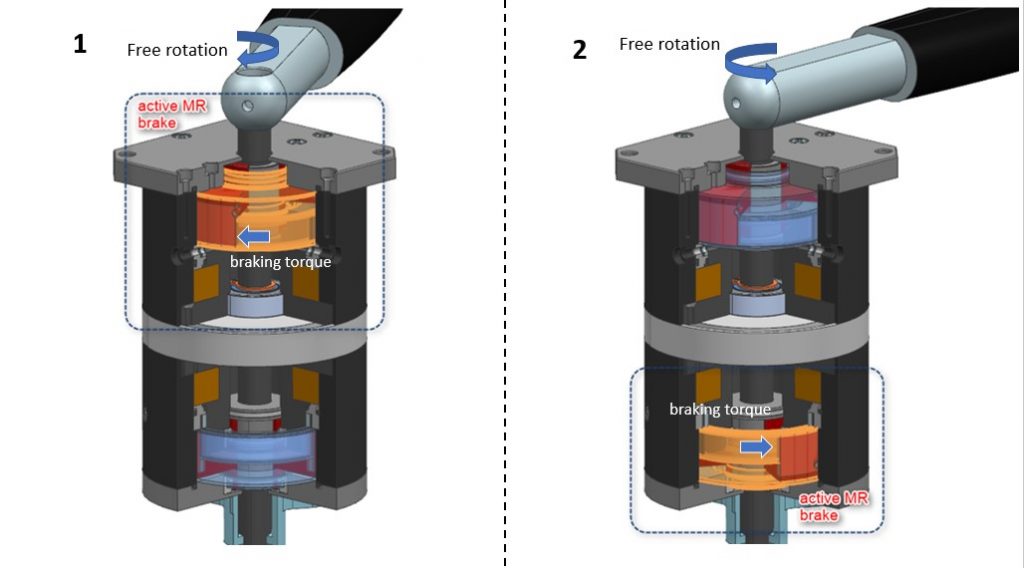
A teleoperation system is composed of a master system on the human operator site, a slave system on the task site and a communication infrastructure between these two systems. Generally, the master system is distant from the task site and human operator by using the master system accomplishes the task via sending commands to use the slave system. Usually, the mentioned commands are motion commands and the master system is responsible for acquiring these motion commands from the human operator. Depending on the necessities of the task, the mentioned motion commands are acquired by sensing generally the hand motion and sometimes sensing the foot, leg, eye or total body movement of the human operator. In the teleoperation system, if the slave system’s physical interaction information with the task site is to be sent to the master system as force-feedback, then the master system is required to transmit this fed-back force information to the human operator. The devices that both acquire the motion of the desired limbs of the human operator and provide the force transmission to the human operator are called kinesthetic haptic devices. In this project, a haptic device will be developed to be used in teleoperation systems. Primary investigator of this project has already developed a haptic device as a result of his completed Marie-Curie International Re-Integration Grant within the European Union 7th Framework Program. In consequence of the analyses and tests carried out on this device, it is foreseen that by the design of new mechanisms, new sub-components and improvements on system modeling, a haptic device that: 1) can acquire accurate motion command even when it is providing force feedback and 2) has enhanced impedance width and transparency performance. The innovative sides of the subject that will be handled in this project are: 1) For the first time, an actuation system that provides a solution to the stiction problem in actuation systems with Magneto-Rheological (MR) fluid, 2) For the first time, as a result of using the stiffness model in acquiring the motion information from the haptic device, weight of the device’s mechanism can be decreased, 3) A passively gravity-balanced R-CUBE mechanism will be developed, 4) A device specific control card will be developed that can be used in the final product.
In what ways the targeted objectives and expected outcomes can have contributions to science, technology, and socio-economy:
In the new generation of robotic systems, human-robot interaction does not only take place in software (i.e. through a teach pendant) but happens as a physical interaction. We will increasingly come across robots that either works with the human or share the same working environment with the human. In this project, it is expected the system and sub-components that will be developed will improve the human-robot interaction and enhance the total system performance. It will be possible to employ the developed sub-components not only in teleoperation systems but also in robots that work with the human or share the same environment with the human. It is possible to use the sub-component and methodologies developed in this project in co-operative robots that will start to work on factory floors in the near future and in rehabilitation robots.