Control of Mechanical Joints that have Joint Clearance
Thesis Student
Gün Gündüzalp
Program
MSc Thesis Project
Status
Completed
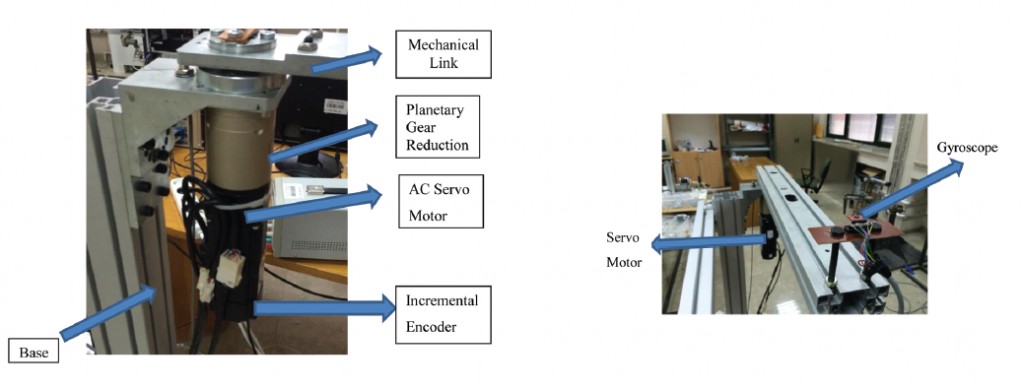
Joint clearance is a defect that is present in all mechanical joints in every mechanism. Joint clearances for revolute joints result from the relatively small difference between the dimensions of diameters of two concentric bodies which interrelated to each other. Manufacturing errors, tolerances, wear, and material deformation lead to joint clearances. Due to these unavoidable reasons, joint clearance is inevitable and has negative impact on the dynamic response on the whole system. There are numerous previous studies to compen sate for the effects of joint clearance. Input shaping method is used to reduce residual vibrations in computer controlled mechanical systems. This method operates by changing the shape of the input. The aim of this study is to adapt input shaping method to the controller of a mechanical joint, that have joint clearance to compensate for the negative effects of the joint clearance, especially residual vibrations. The input shaping method is a model-based approach and therefore, exact knowledge of the system model is required. In this thesis, the first work is carried out to identify the system model. This is accomplished in two stages for the system without joint clearance and with joint clearance. Later, the input shaping method is implemented and tested on the simulation model of the mechanical joint with joint clearance. After receiving acceptable results in simulation tests, the method is implemented on the experimental system and system response is evaluated for a variety of inputs. The experimental test results indicated that the input shaping method applied to the cont roller of a mechanical joint with joint clearance makes the system free of residual vibrations especially for the inputs with relatively higher acceleration and jerk profiles.