The Control of the Endoscope Router Robot to be used in Endonasl Surgeries Supported by Deep Learning Algorithms (CleverScope)
Funding Agency
THE SCIENTIFIC AND TECHNOLOGICAL RESEARCH COUNCIL OF TURKEY (TÜBİTAK)
Program
1001
ID/Acronym
123M353 / CleverScope
Grant Period
2023-2025
Principal Investigator
Dr. Mehmet İsmet Can Dede
Project Partners
Department of Mechanical Engineering, Izmir Institute of Technology
Hacettepe University, Brain and Neurosurgery Department
Project Reseachers and Consultants
Dr. M. İ. Can Dede
Dr. Gökhan Kiper
Dr. Yalın Baştanlar
Dr. Şenay Mihçin
Dr. Omar Maaroof, (University of Mosul)
Dr. Mustafa Berker (Hacettepe University)
Dr. İlkay Işıkay (Hacettepe University)
Dr. Şahin Hanalioğlu (Hacettepe University)
Aim:
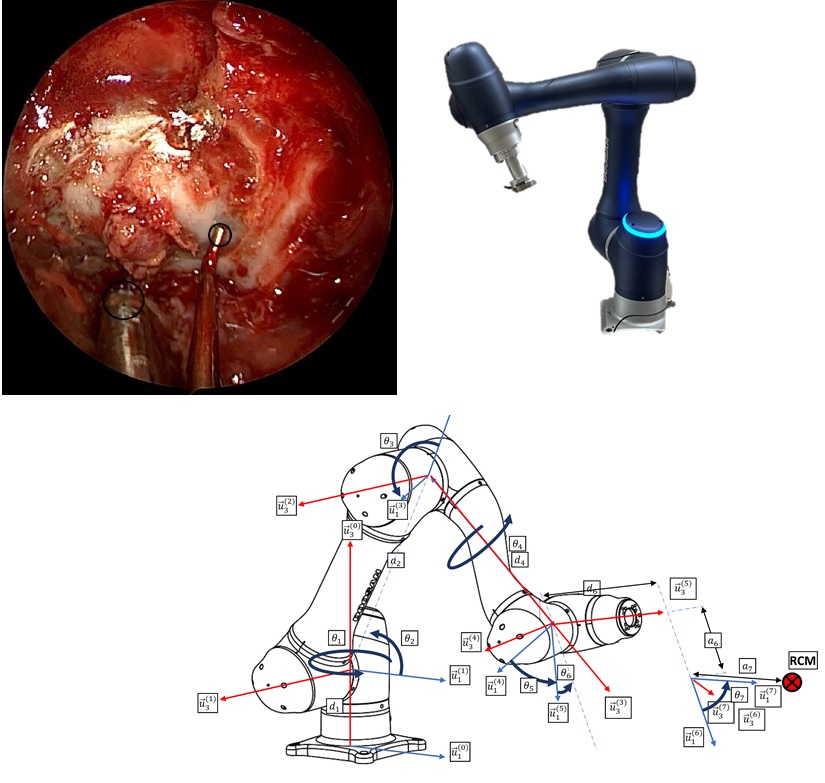
In this project, we aim to take the camera system called endoscope, which is used in endonasal surgery procedures, from the surgeon’s hand and direct it with a robot system. Accordingly, the surgeon will be able to adjust the motion direction and speed of the endoscope while using other surgical instruments with both hands. An industrial collaborative robot will be used. The end-effector, which will be connected to the last joint of this robot and will hold the endoscope, will be designed and produced. By processing the images taken from the endoscope and collecting information from a foot pedal, the surgeon’s demands will be perceived and the robot will be able to move the endoscope in the desired direction with the desired speed.
Short Summary of the Topic:
The robot system to be developed is a novel surgical robot system in terms of its human-robot interaction interfaces. It is a novel approach to use the images taken from the operating field, which is a very dynamic environment, to determine the desired motion direction and speed of the endoscope by processing and interpreting them. Furthermore, the work of optimizing the movement of the end-effector around the robot’s remote center of motion to increase the robot’s performance includes a novelty.
In the design of the end-effector, robot’s payload capacity and motion limits, specified working space requirements of the endoscope, and the surgeon’s viewing angle information will be used to optimize the design. Tips of the surgical instruments used by the surgeon will be continuously detected in the images of the operating field taken from the endoscope with the help of deep learning methods. According to the location and movement of these surgical instruments, the required orientation and speed of the endoscope will be determined automatically which will be used to generate driving commands for the robot. The surgeon will be able to switch on this autonomous control modality with a foot pedal. The developed system will be tested on a skull mock-up model by the project consultants who are Hacettepe University Neurosurgeons..
Organizational Approach and the main structure of the Method:
Project manager will manage the project with the support of Dr. Yalın Baştanlar. It is the task of the project management to convey information to the consultant surgeons, to organize joint meetings, and to schedule system testing studies. The project coordinator will work with the doctoral student to prepare the project’s website. During dissemination processes within IFToMM Summer School Dr. Gökhan Kiper will provide his support. Dr. Kiper and Dr. Omar Maaroof will work on the optimization of the robot’s end-effector. Dr. Şenay Mihçin will contribute to processing the user test reults carried out with the surgeons. The surgeon consultants from Hacettepe University Neurosurgery Department will participate in the testing of human-robot interfaces developed in the project and ultimately the surgical robot system through user evaluation tests.
On How to contribute to the goals and targets of the call program with the expected targets and outcomes of the project::
Surgical robots subject is studied intensively in the world these days and the progress to be made in this subject contributes to the scientific knowledge accumulation in our country and in the world at a high level. Subject-specific project calls and scholarships are defined for the advancement of studies in this field in our country. For example, in the priority technology field of “Biomedical Equipment Technologies” in the priority areas document (https://www.tubitak.gov.tr/sites/default/files/21566/tubitak_cp2021.pdf) published by TUBITAK, “Robotic Surgery Technologies” is a priority research area. This project application is aligned with this priority area by developing a surgical robot system. Thanks to such projects, it is possible for spin-off companies to emerge and the developed technologies to be used in other application areas. For example, robots with remote motion center capabilities can be used in pipe welding applications.
Öztürk, Ç., Kiper, G., Dede, M.İ.C. (2025, September). Minimal İnvaziv Ameliyat Simülatörleri için Sanal Uzak Hareket Merkezi Oluşturulması. In 22. Ulusal Makina Terorisi Sempozyumu, 3-5 Eylül 2025.